Marine EM Studies of the Scarborough Gas Field
In May/June 2009 we carried out a 32 day cruise on the Scripps research vessel Roger
Revelle
to conduct experiments over the Scarborough
gas field on the northwest shelf of Australia, for a project funded by
BHP Billiton Petroleum. The goals of
this work are to extend our understanding of marine EM methods and
to test new instrument systems, such as towed 3-axis receivers and
sensitive instruments to measure gradients of sea floor EM fields.
We conducted a dedicated survey for shallow gas and gas
hydrate, as well as a combination of 2D and 3D data collection strategies.
A total of 144 receiver deployments and recoveries were made and we towed our
EM transmitter a total of 320 km (not including turns) over 12 days.
PDF of fall 2009 AGU slides (1.8 Mb)
Preliminary cruise report for this project (10 Mb)
Steve's daily Log from
the R.V. Roger Revelle
All photos and videos
are copyright Kerry Key or Steven Constable, unless noted
otherwise.
July 26, 2009. High
definition movies are here! This
link takes you to the directory with the HD versions of
all the movies we posted during the cruise.
( 720p and 75-300 MB). The links below still point to the
low def versions.
June 21, 2009.
The two SUESIs going home after a job well done. Both instruments contributed
to the experiment, which was a huge success, so they deserve their smiles.

June 17, 2009. We
haven't seen much marine life this cruise, but tonight
we had an amazing spectacle––a pair of Mahi
Mahi's in a feeding frenzy during an instrument recovery.
Here's video clip showing them attacking some flying fish.
If I only had grabbed the video camera two minutes earlier,
I would have captured the Mahi swimming around
one of our receivers. (Quicktime, 17 MB.)
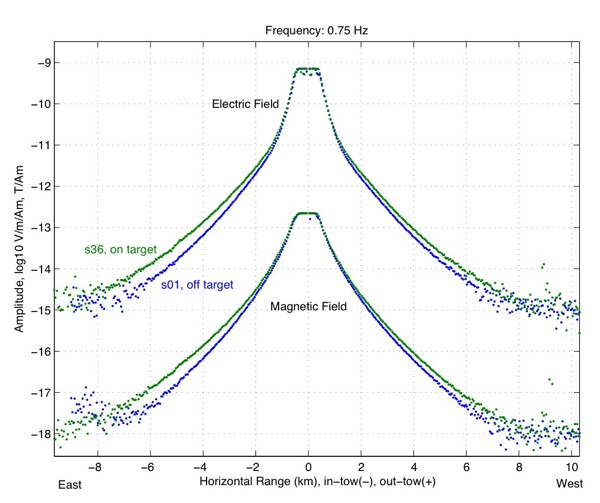
June 15, 2009. Houston
(err, I mean Perth), we've got an anomaly! Here's a sample
of the data from the Phase 1 mainline tow. Site s01 is
the easternmost site and located off the known gas field.
Site s36 is located over the western edge of the gas field,
and as expected, exhibits much larger electric and magnetic
field amplitudes than the off-target site. These responses
were obtained by simple 60 s stacks of 4 s binned data.
With a combination of longer stack lengths and robust
processing techniques, we expect our ultimate noise floors
to be around 10-15 V/Am2 and 10-18 T/Am.
June 9, 2009. We've
been uploading lots of videos of our EM receivers and
SUESI's starting to feel neglected. So here you go, this
one is for SUESI. (Quicktime,
6.0 MB).
June 8, 2009. Our
young apprentice Brent Wheelock just knocked out his first
iMovie, showing another spectacular sunrise aboard the
Revelle. Brent recommends headphones for the optimal viewing
experience. (Quicktime,
9.8 MB).
June 5, 2009. Here's
a music video montage of the night crew recovering the
seafloor EM receivers. (Quicktime, 4.2 MB).
June 5, 2009. Here's
a remix of the fast deployment movie, now with a better
soundtrack. (Quicktime, 4.8 MB).
June 2, 2009. We've
been a bit busy the past week deploying/towing/recovering/redeploying
and there hasn't been much free time for crafting up a
new movie clip, until now
that is. (3MB Quicktime Movie).
June 2, 2009. In
search of the Exmouth Plateau conductivity anomaly. Here's
a screen shot of 60 minutes of nice looking magnetotelluric
data recorded by four of our receivers.
With the longer period MT data, we hope to image a
large conductivity anomaly at about 10 km depth that
our colleague Graham Heinson discovered a few years ago.
This conductor might be related to a deep detachment fault
that has been postulated to explain the thinner crust
of the Exmouth Plateau as compared to the nearby Pilbara
Craton onshore.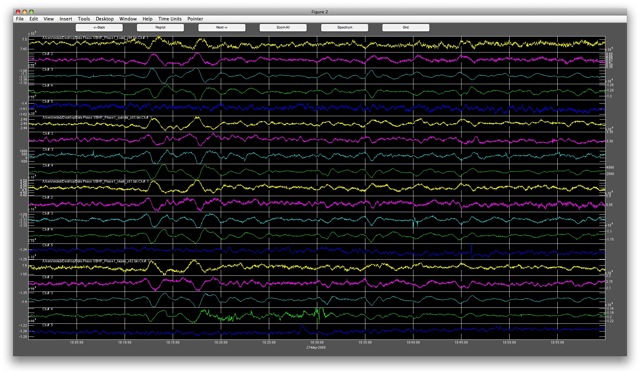
June 1, 2009. Does anybody recognize this fish?
From 950 meters deep, 20 deg S, 113 deg E.

May 31, 2009. The logo for the cruise T-shirt,
cleverly done in the style of Weiss
May 29, 2009. Where's
the transmitter? Our newly developed "Barracuda" long
baseline navigation system is working really well this
cruise. We tow two para-vanes that we've named Barracudas
about 300 m diagonally behind the ship.
Each Barracuda is outfitted with a gps and radio modem
that transmits its position back to the ship, and most
importantly each Barracuda has an acoustic transponder
on it. We ping on the Barracudas from the Benthos acoustic
system mounted on SUESI and then use the known Barracuda
positions and acoustic ranges along with depth measured
by SUESI's pressure gauge to triangulate SUESI's position.
I (Kerry) just finished writing a Matlab interface that
reads these data streams in real-time and computes SUESI's
position. Below is a screen shot of this tool in action.
The red dot is the Revelle and the cyan and magenta triangles
are the positions of the Barracudas. The black dots are
the navigated positions of SUESI during the tow. With
the exception of a few obvious outliers, overall the
navigation looks good to 10-30 m scatter or so. We expect
to do much better than this in post-processing of this
data.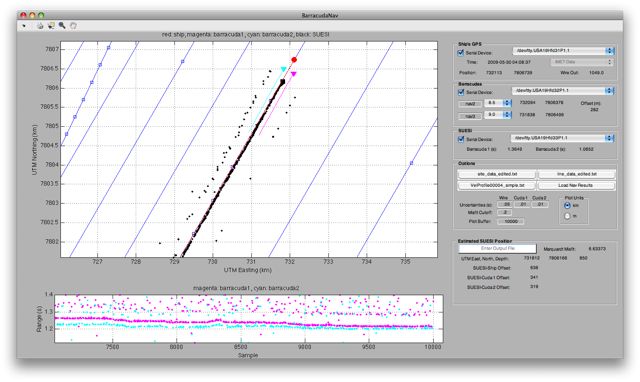
May 27, 2009. SUESI
being deployed.
May 27, 2009. A-frame
up. The deck team performs final checks on SUESI before she's
deployed to the briny deep.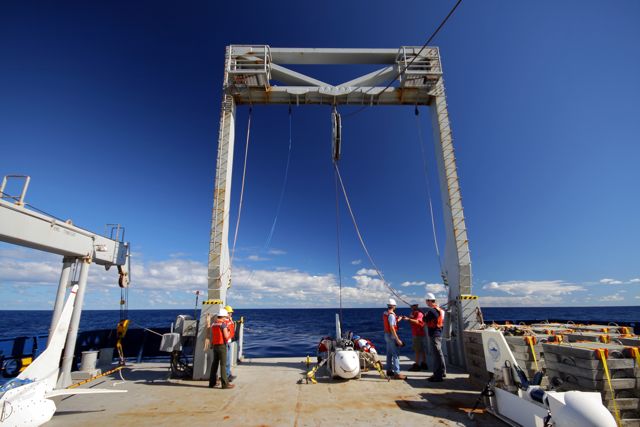
May 27, 2009. Steven
Constable leads the deck team in preparing one of SUESI's two
antenna electrodes. 
May 27, 2009. Arnold
Orange standing next to SUESI's antenna spooling winch.
SUESI's antenna is made to be neutrally buoyant by
a thick casing of foam rubber. The copper pipe near the
center of the winch is one of the antenna's electrodes.
May 27, 2009. Chris Armerding
prepares the antenna mounts on SUESI's tow frame. This
is actually SUESI #2, easily identified by her snaggle
tooth.
May 27, 2009. Cambria
Colt (right) instructs the deck team on the deployment
procedure for our transmitter SUESI. From left to right:
Brent Wheelock, David Myer, Arnold Orange, Jeff Markel,
Jennifer Shelstead and Cambria Colt.
May 26, 2009. Thanks
to Jeremy Prince for sending Steve this nice photo of the
Revelle leaving Fremantle last week.
May 25, 2009. Preparing
to deploy long-wire electromagnetic sensors (LEMS) from
the aft deck of the Revelle. The LEMs have 200 m long antennas
capable of recording much smaller electric fields than
our conventional EM receivers, but require much more effort
to deploy. We use a deep tow frame to hold the LEM receiver
while it is lowered by cable to the sea floor. Once it's
within a few meters of the sea floor, the deep tow package
releases the LEM to the sea floor. The upper
photo below shows Chris Amerding, Steve Constable and Brent
Wheelock preparing the LEM deeptow vehicle, while Cambria
Colt handles the A-Frame controls. In the lower photo,
Steve Constable stands next to the LEM instrument, which
is tucked inside the stainless steel deeptow vehicle.

May 25, 2009. This image
shows the survey area relief, the deployment sites
(squares) and CSEM tow paths (white lines). This is actually
a screen shot from a 3D rendering program called Fledermaus,
which we use to display the realtime position of the Revelle
and our transmitter SUESI. The vertical exaggeration is
x20.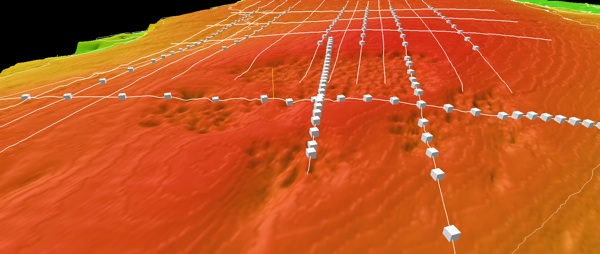
May 25, 2009. Here's
a movie clip of the night crew assembling a marine EM receiver
and then deploying it. The clip has been sped up by a
factor of 20 (3MB Quicktime file).
May 24, 2009. Here's
a short movie clip of a marine EM receiver being deployed
this morning (3 MB Quicktime file).
May 24, 2009. The EM
receiver deployments are well underway---as of noon 29
are on the sea floor and only 23 more to go. Here's an
image taken during a sunrise deployment
.
May 24, 2009. I (Kerry)
like working the midnight to noon shift since you often
get to see sunrises like the one below. This photo also
shows the gear on the back deck of the Revelle.

May 22, 2009. Going
to Scarborough, short quicktime movie (7 MB)
May 21, 2009. Rainbow in sea spray off the port side during the
transit out to the research area (in less than ideal weather).

May 20, 2009. Revelle tied up at Victoria Quay, Fremantle, just prior to pushing
off.

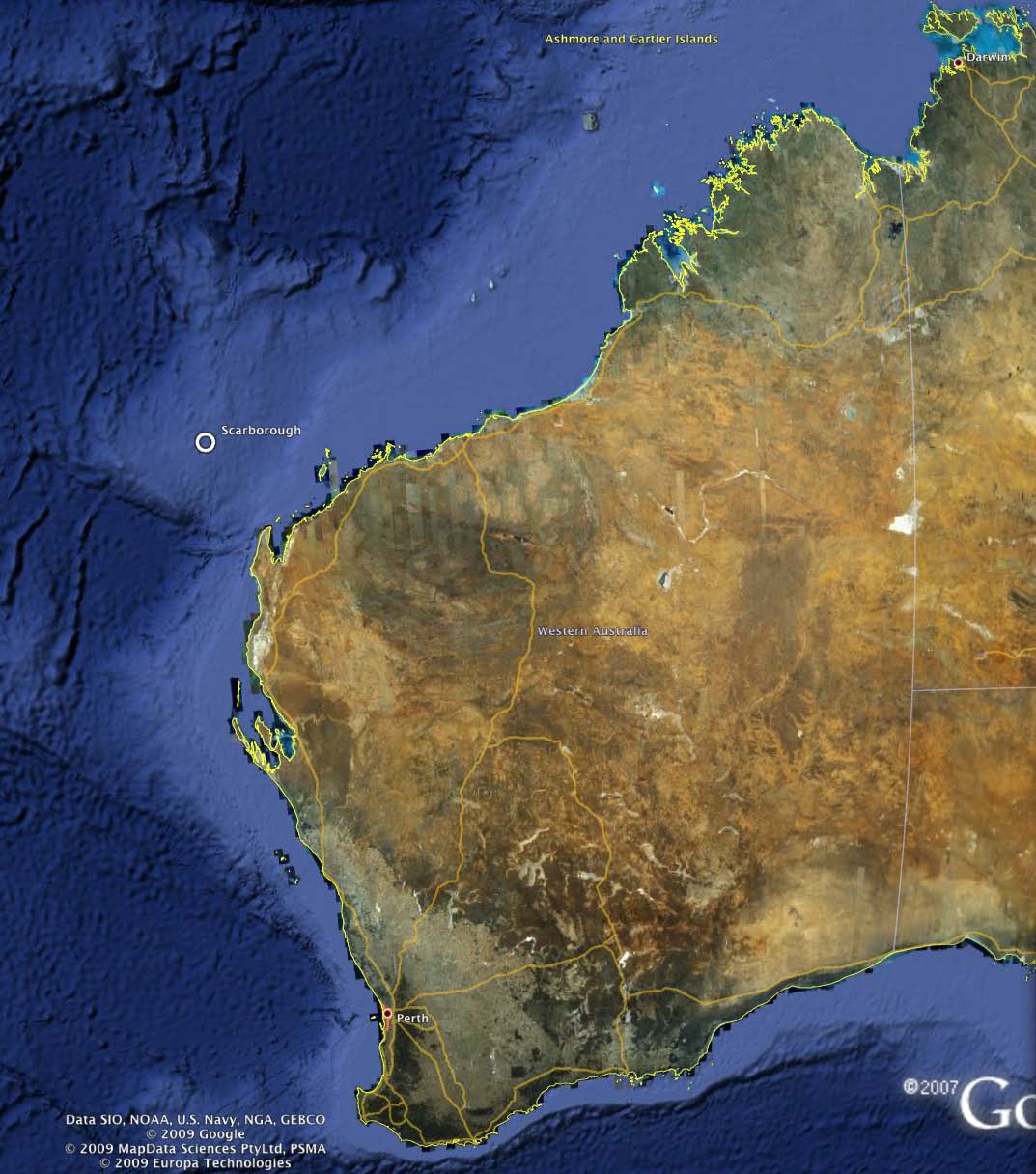
Location of the research area:
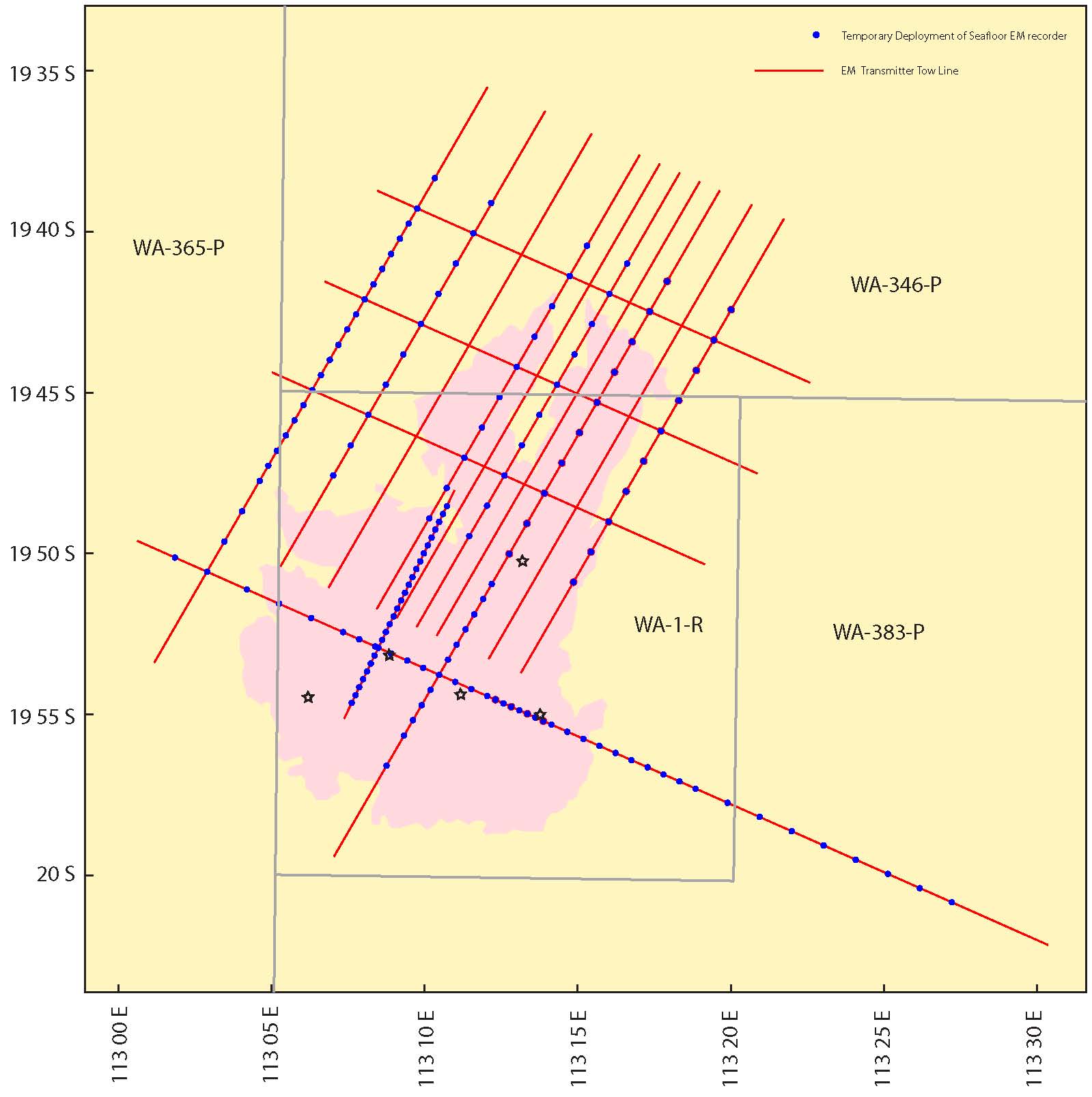
Layout of the project:
|

